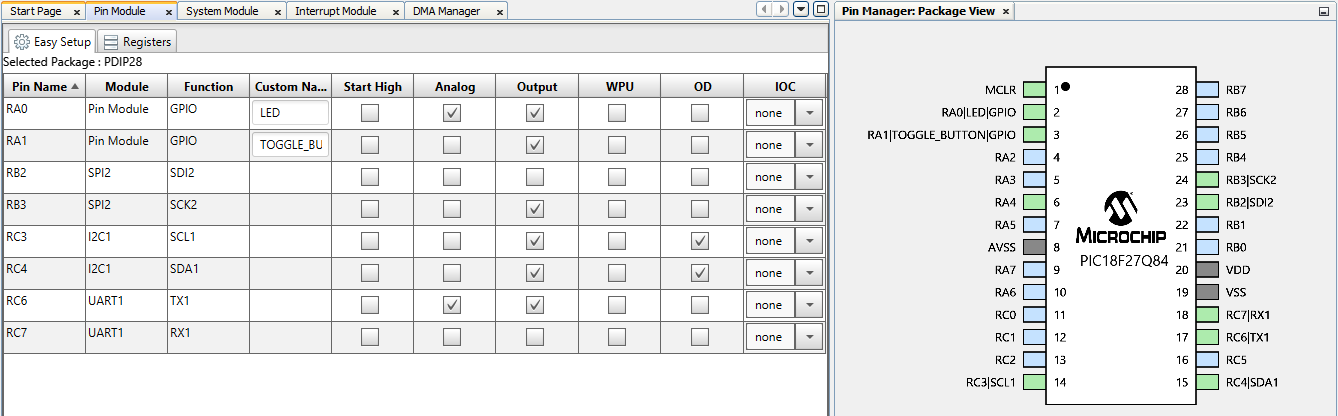
/*PIN ALLOCATIONS
RA0 - Debuggin LED
RA4 - MTRCSN (Motor SS/GPIO pin)
RB2- MTRSI (Motor serial in)
RB3- MTRSCK (Motor clock)
RC3 - SCLK (for both temp and humidity I2C)
RC4 - SDA (I2C data for both temp & humidity)
RC5 - MTRSL (Motor serial out)
RC6 - RX (Receiving)
RC7 - TX (Transmitting to ESP 32)
*/
#include "mcc_generated_files/mcc.h"
#include "mcc_generated_files/examples/i2c1_master_example.h"
//need to create ISR here like in homework with timers and interrupts
//interrupt should occur when temperature reaches xx degrees
unsigned readtemp;
unsigned temp;
uint8_t dbuff[4];
uint16_t conv = 0;
double humidity = 0;
volatile uint8_t words;
int ii;
float value;
int count=0;
//if (count%100==0)
//LED_Toggle();
void main(void) {
SYSTEM_Initialize();
// I2C1_Initialize();
// UART1_Initialize();
// I2C1_InterruptHandler(I2C1_Read);
#define address 0b00011001000 //address for LM75b
INTERRUPT_GlobalInterruptEnable();
//INTERRUPT_PeripheralInterruptEnable()
while (1) {
//UART1_SetRxInterruptHandler(UART1_RX_ISR);
//////////////// humidity /////////////////
I2C1_ReadNBytes(0x27, dbuff, 1);
__delay_ms(38);
I2C1_ReadNBytes(0x27, dbuff, 4);
conv = (dbuff[0] << 8 | dbuff[1]) & 0x3fff;
__delay_ms(500);
humidity = (conv / (16384.0 - 2.0)) * 100.0;
// if (humidity > 0) {
// LED_SetHigh(); ///ADD MOTOR CONTROL
// }
//
// if (temp < 80) {
// //open up lid, interrupt goes off here to send signal to motor driver
// LED_SetHigh();
// __delay_ms(500);
// LED_SetLow();
// __delay_ms(500);
// }
// if (temp > 80) {
// //open up lid, interrupt goes off here to send signal to motor driver
// LED_SetHigh();
// __delay_ms(250);
// // LED_SetLow();
// // __delay_ms(250);
// }
//////////////// temperature /////////////////
readtemp = I2C1_Read1ByteRegister(address, 0x00);
temp = ((readtemp * 1.8) + 32); //convert to fahrenheit
printf("hello! Temp = %u Humidity = %2u \n\r", temp, humidity);
__delay_ms(500);
if (temp = 75)
{
LED_SetHigh();
__delay_ms(1000);
}
else
{
LED_SetLow();
__delay_ms(100);
}
}
}